
3D Maxwell equations using Nedelec elements#
Dealing with 3D Maxwell problem using Nedelec elements is very similar to the 2D case. We consider the academic Maxwell problem:
equipped with the natural boundary condition:
The variational formulation in \(V=H(curl,\Omega)\}\) is to find:
In the example we use as a solution
with \(\DeclareMathOperator{\curl}{curl} \mathbf{f}=\curl \curl \mathbf{E}_{ex} - \omega^2 \mu \varepsilon \mathbf{E}_{ex}\) and \(\DeclareMathOperator{\curl}{curl} \mathbf{g}=\curl \mathbf{E}_{ex}\times n\).
Using the first family Nedelec’s elements, the XLiFE++ program looks like:
#include "xlife++.h"
using namespace xlifepp;
Real omg=1, eps=1, mu=1, a=pi_, ome=omg* omg* mu* eps;
Vector<Real> f(const Point& P, Parameters& pa = defaultParameters)
{
Real x=P(1), y=P(2), z=P(3);
Vector<Real> res(3);
Real c=3*a*a-ome;
res(1)=-2*cos(a*x)*sin(a*y)*sin(a*z)*c;
res(2)= sin(a*x)*cos(a*y)*sin(a*z)*c;
res(3)= sin(a*x)*sin(a*y)*cos(a*z)*c;
return res;
}
Vector<Real> fg(const Point& P, Parameters& pa = defaultParameters) // rot u
{
Real x=P(1), y=P(2), z=P(3);
Vector<Real> res(3);
res(1)= 0.;
res(2)=-3*a*cos(a*x)*sin(a*y)*cos(a*z);
res(3)= 3*a*cos(a*x)*cos(a*y)*sin(a*z);
Vector<real_t>& n=getN();
return crossProduct(res,n);
}
Vector<Real> solex(const Point& P, Parameters& pa = defaultParameters)
{
Real x=P(1), y=P(2), z=P(3);
Vector<Real> res(3);
res(1)=-2*cos(a*x)*sin(a*y)*sin(a*z);
res(2)= sin(a*x)*cos(a*y)*sin(a*z);
res(3)= sin(a*x)*sin(a*y)*cos(a*z);
return res;
}
int main(int argc, char** argv)
{
init(argc, argv, _lang=en);
// mesh cube using gmsh
Cube cu(_origin=Point(0.,0.,0.), _length=1.,_nnodes=11, _domain_name="Omega", _side_names="Gamma");
Mesh mesh3d(cu, _shape=tetrahedron, _generator=gmsh, _name="mesh of the unit cube");
Domain omega=mesh3d.domain("Omega"), gamma=mesh3d.domain("Gamma");
// define space and unknown
Space V(_domain=omega, _interpolation=N1_1, _name="V", _notOptimizeNumbering);
Unknown e(V, _name="E"); TestFunction q(e, _name="q");
// define forms
BilinearForm aev=intg(omega, curl(e)|curl(q)) - ome*intg(omega, e|q);
LinearForm lf=intg(omega, f|q);
Function g(fg); g.require(_n);
LinearForm lg=intg(gamma, g|q);
// compute matrix and vector
TermMatrix A(aev, _name="A");
TermVector b = TermVector(lf)+ TermVector(lg);
// solve system
TermVector E=directSolve(A, b);
// L2 projection on P1 FE
Space W(_domain=omega, _interpolation=P1, _name="W");
TermVector EP1=projection(E, W, 3);
saveToFile("E.vtu", EP1, _data_name="E");
// interpolation on P1 mesh
Unknown u(W, _name="u", _dim=3);
TermVector Ei=interpolate(u,omega,E,"Ei");
saveToFile("Ei", Ei, _format=vtu);
return 0;
}
As Nedelec finite elements approximation are not conforming in \(H^1(\Omega)\), the solution is not continuous across elements (only tangent component is continuous). So to represent the solution, it is projected on \(H^1(\Omega)\) as follows, by finding:
Using an H1 conforming approximation for \(\mathbf{E}_1\) leads to a continuous representation of the projection. We show on the next figure the module of the field \(E\) provided by this example:
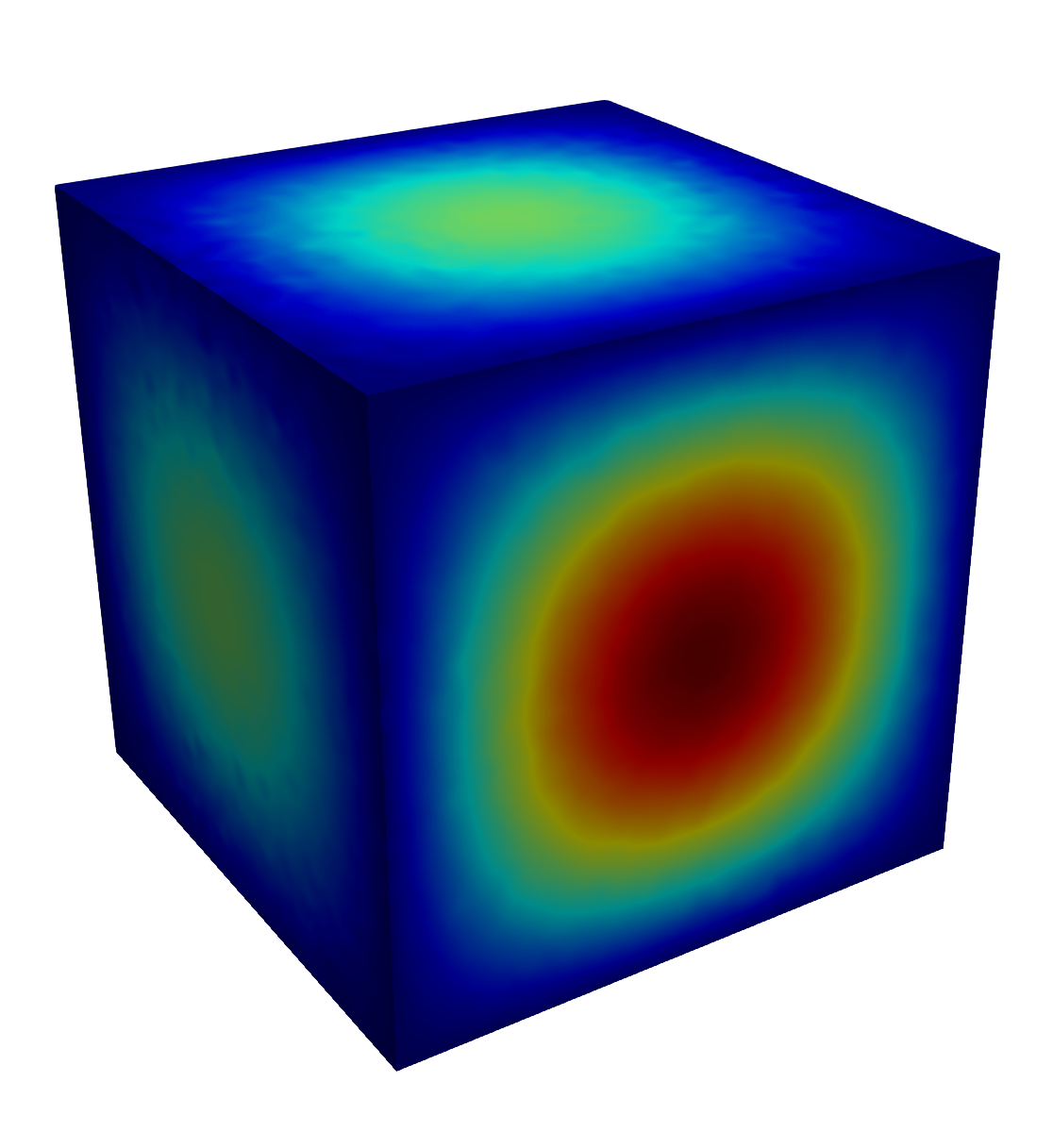
Fig. 9 Module of the solution of the Maxwell 3D problem using Nedelec first family elements#
Alternatively, the interpolate function provides the interpolation of \(E\) on nodes of a P1 approximation.
On the next figure, the convergence curve shows a rate convergence of \(L^2\) error in \(h^{1.3}\) :
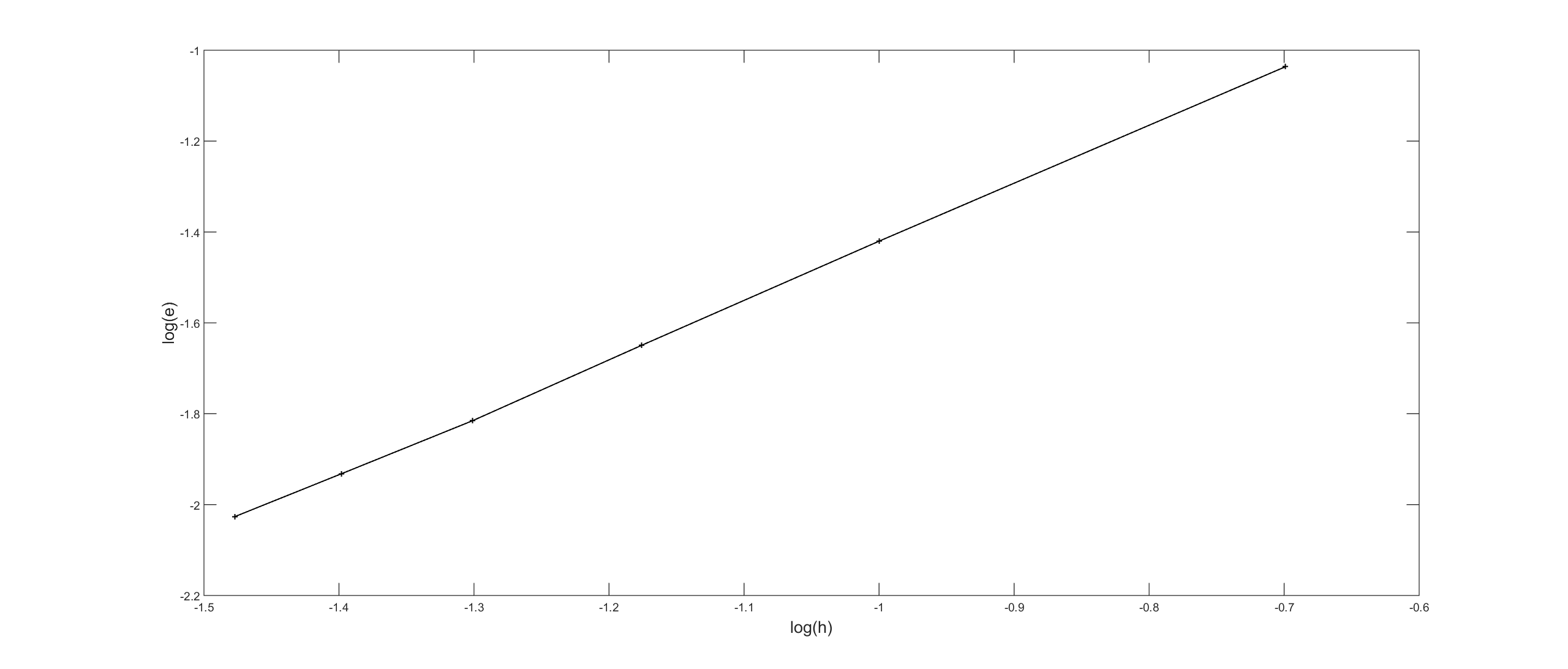
Fig. 10 \(L^2\) errors versus the step \(h\) for first order Nedelec first family approximation#