
3D Maxwell problem using EFIE#
Solving diffraction of an electromagnetic plane wave on a obstacle using BEM is more intricate. Indeed, it is a vector problem and it involves Raviart-Thomas elements. We show how XLiFE++ can deal easily with.
Let \(\Gamma\) be the boundary of a bounded domain \(\Omega\) of \(\mathbb{R}^3\), we want to solve the Maxwell problem on the exterior domain \(\Omega_e\):
where \((\mathbf{E}_{inc},\mathbf{H}_{inc})\) is an incident field (a solution of Maxwell equation in free space), for instance a plane wave.
The EFIE (Electric Field Integral Equation) consists in finding the potential \(\mathbf{J}\) in the space
such that:
where \(G\) is the Green function related to the Helmholtz 3D problem in free space.
This equation has a unique solution, except for a discrete set of wavenumbers corresponding to the resonance frequencies of the cavity \(\Omega\).
Using the Stratton-Chu representation formula, the scattered electric field may be reconstructed in \(\Omega_e\):
This problem is implemented in XLiFE++ as follows:
#include "xlife++.h"
using namespace xlifepp;
Vector<complex_t> data_incField(const Point& P, Parameters& pars)
{
Vector<real_t> incPol(3, 0.); incPol(1)=1.; Point incDir(0., 0., 1.) ;
Real k = pars("k");
return incPol * exp(i_*k * dot(P, incDir));
}
Vector<complex_t> uinc(const Point& P, Parameters& pars)
{
Vector<real_t> incPol(3, 0.); incPol(1)=1.; Point incDir(0., 0., 1.) ;
Real k = pars("k");
return incPol*exp(i_*k * dot(P, incDir));
}
int main(int argc, char** argv)
{
init(argc, argv, _lang=en);
// define parameters and functions
Real k= 1, R=1.; Parameters pars;
pars << Parameter(k, "k") << Parameter(R, "radius");
Kernel H = Helmholtz3dKernel(pars); // load Helmholtz3D kernel
Function Einc(data_incField, pars); // define right hand side
Function Uex(scatteredFieldMaxwellExn, pars);
// meshing the unit sphere
Number npa=15; Point O(0, 0, 0);
Sphere sphere(_center=O, _radius=R, _nnodes=npa, _domain_name="Gamma");
Mesh meshSh(sphere, _shape=triangle, _generator=gmsh);
Domain Gamma = meshSh.domain("Gamma");
// define FE-RT1 space and unknown
Space V_h(_domain=Gamma, _interpolation=RT_1, _name="Vh");
Unknown U(V_h, _name="U"); TestFunction V(U, _name="V");
// compute BEM system and solve it
IntegrationMethods ims(_method=SauterSchwabIM, _order=4, _bound=0.,
_quad=defaultQuadrature, _order=5, _bound=2.,
_quad=defaultQuadrature, _order=3);
BilinearForm auv = k*intg(Gamma, Gamma, U*H|V, ims)
-(1./k)*intg(Gamma, Gamma, div(U)*H*div(V), ims);
TermMatrix A(auv, _name="A");
TermVector B(-intg(Gamma, Einc|V));
TermVector J = directSolve(A, B);
// get P1 representation of solution and export it to vtu file
Space L_h(_domain=Gamma, _interpolation=P1, _name="Lh");
Unknown U3(L_h, _name="U3", _dim=3); TestFunction V3(U3, _name="V3");
TermVector JP1=projection(J, L_h, 3, _L2Projector);
saveToFile("JP1", JP1(U3[1]), vtu);
// integral representation on y=0 plane (excluding sphere), using P1 nodes
Number npp=30, npc=5;
Square sqx(_center=O, _length=20., _nnodes=npp, _domain_name="Omega");
Disk dx(_center=O, _radius=1.2*R, _nnodes=npc);
Mesh mx0(sqx-dx, _shape=triangle, _generator=gmsh);
mx0.rotate3d(1., 0., 0., pi_/2);
Domain py0 = mx0.domain("Omega");
Space Vy0(_domain=py0, _interpolation=P1, _name="Vy0", _notOptimizeNumbering);
Unknown W(Vy0, _name="W", _dim=3);
IntegrationMethods im(_quad=defaultQuadrature, _order=10, _bound=1., _quad=defaultQuadrature, _order=5);
TermVector Uext=(1./k)*integralRepresentation(W, py0, intg(Gamma, grad_x(H)*div(U), _method=im), J)
+ k*integralRepresentation(W, py0, intg(Gamma, H*U, _method=im), J);
saveToFile("Uext", Uext, _format=vtu);
// build exact solution, export to vtu file and compute error
TermVector Uexa(W, py0, Uex);
saveToFile("Uexa", Uexa, _format=vtu);
TermMatrix M(intg(py0, W|W));
TermVector E=Uext-Uexa;
theCout << "L2 error = " << sqrt(real(M*E|E)) << eol;
return 0;
}
In order to build an approximated space of \(\DeclareMathOperator{\divop}{div} H_{\divop}(\Gamma)\) we use the Raviart-Thomas element of order 1.
As the integrals involved in bilinear form are singular, we use here the Sauter-Schwab method to compute them when two triangles are adjacent, a quadrature method of order 5 if the two triangles are close (\(0<d(T1,T2)<2h\)) and a quadrature method of order 3 when the two triangles are far (\(d(T1,T2)>=2h\)).
Note that the unknowns in RT approximation are the normal fluxes on the edge of the triangulation. In order to plot the potential \(\mathbf{J}\), we have to move to a P1 representation, say \(\widetilde{\mathbf{J}}\). This can be done using a L2 projection from \(\DeclareMathOperator{\divop}{div} H_{\divop}(\Gamma)\) to \(L^2(\Gamma)\):
This is what is done by the XLiFE++ function projection.
We obtain the following potential:
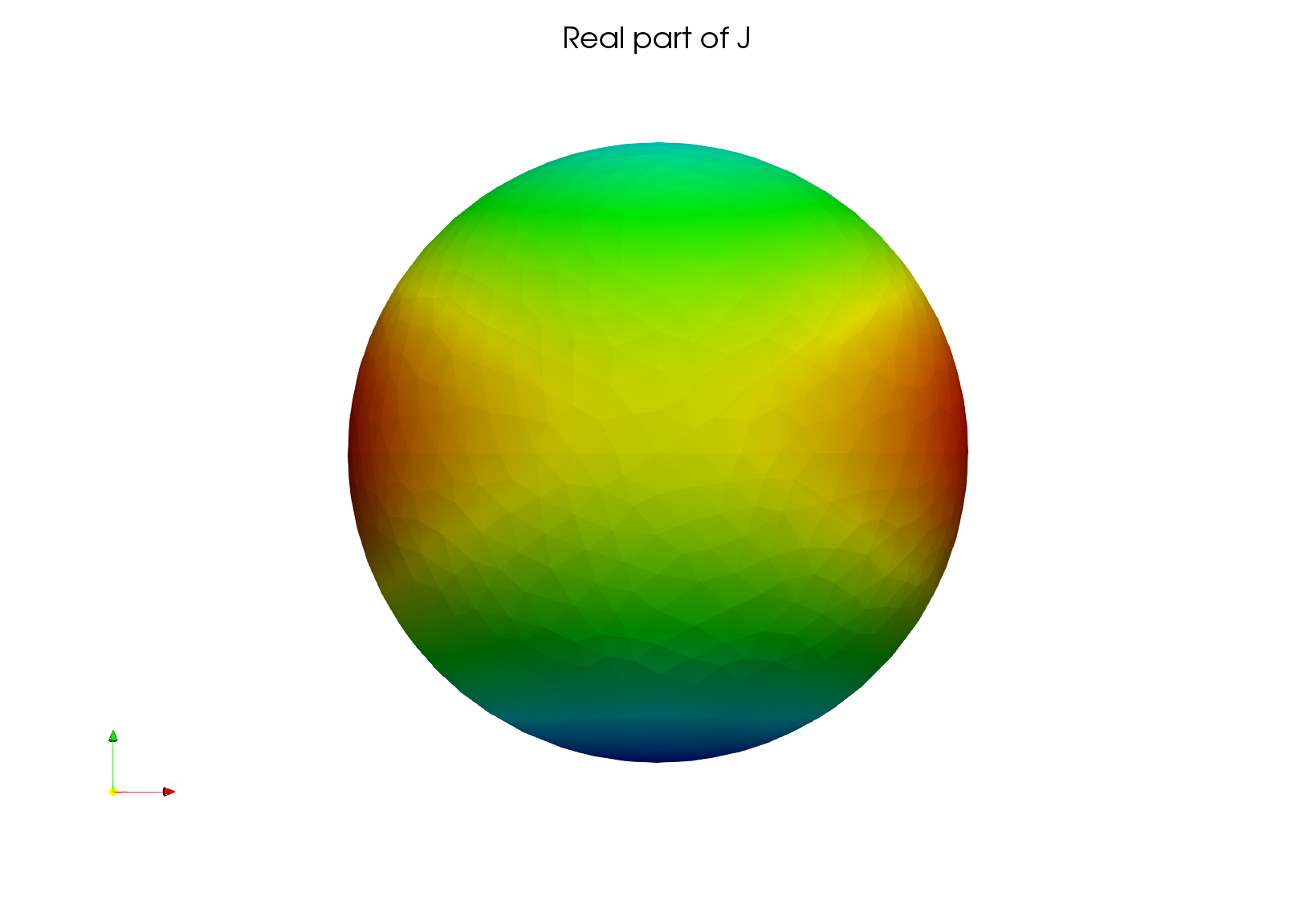
Fig. 29 3D Maxwell problem on the unit sphere, using EFIE, potential#
On the following figures, we show the approximated electric field and the exact electric field. The component \(E_y\) is not shown because it is zero.
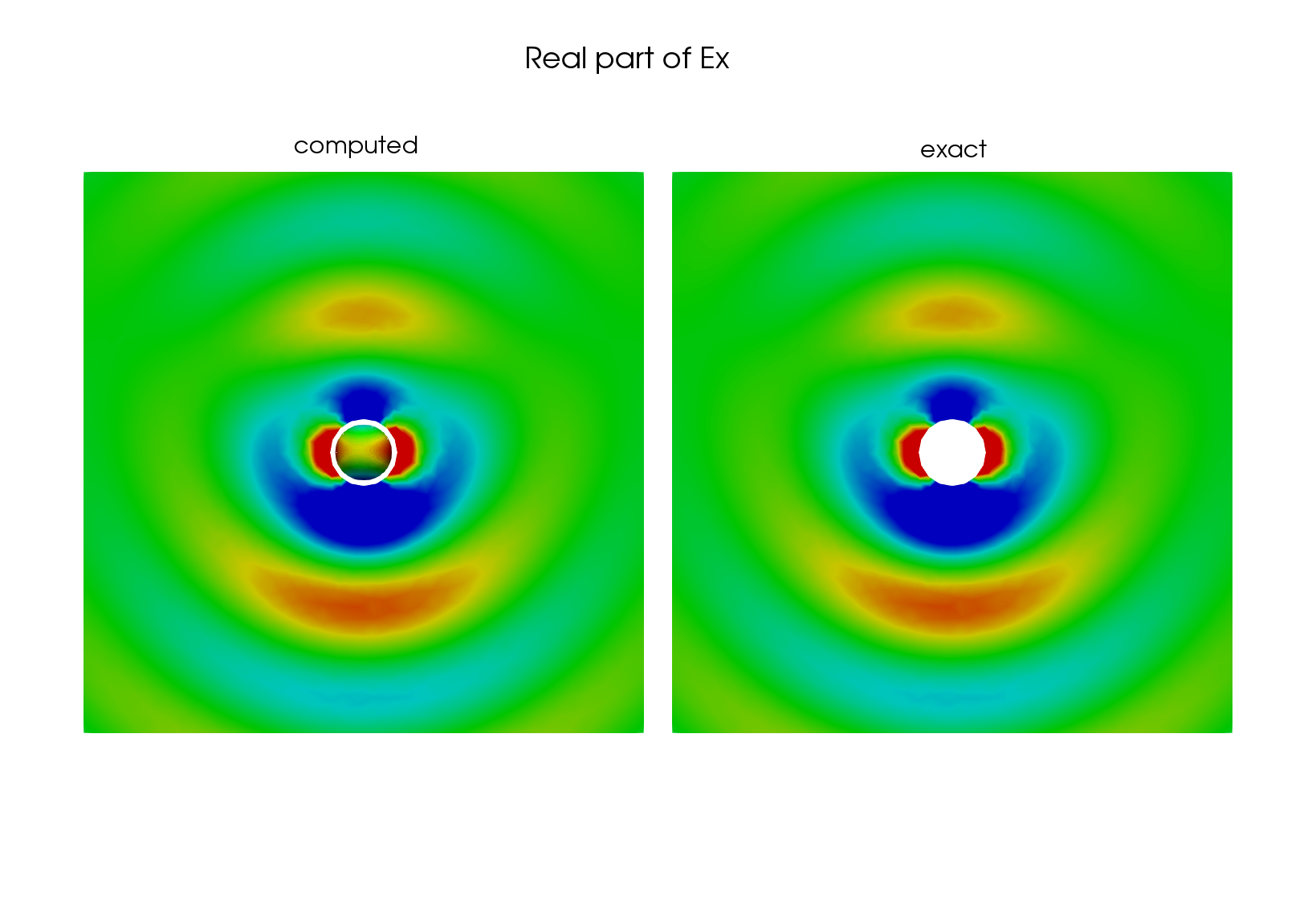
Fig. 30 3D Maxwell problem on the unit sphere, using EFIE, x component#
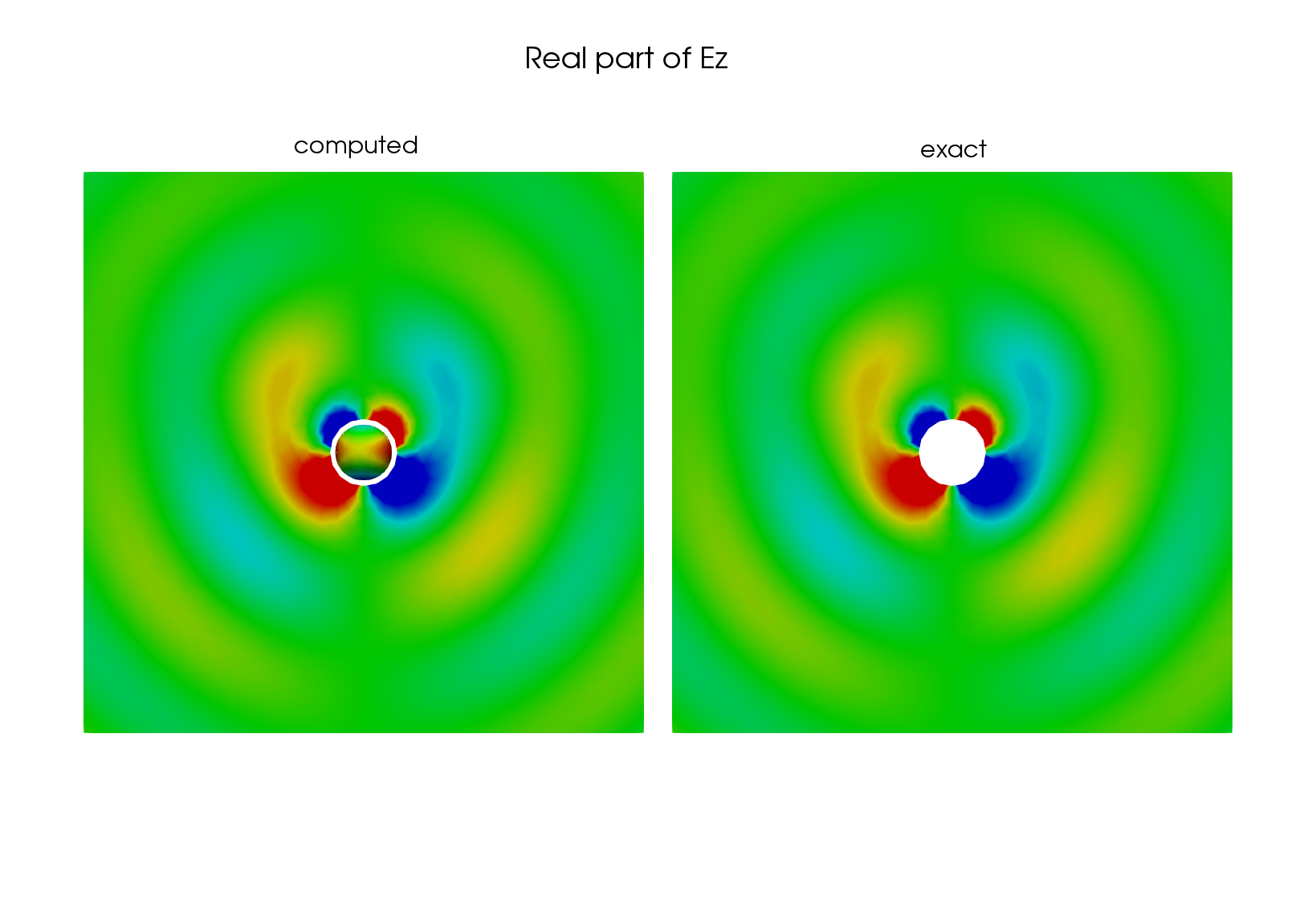
Fig. 31 3D Maxwell problem on the unit sphere, using EFIE, y component#