
2D Stokes problem#
We consider the problem of a flow entrained in a cavity, say \(\Omega=]0,1[\times]0,1[\):
with \(\mathbf{f} \in L^2(\Omega)\) and \(\mathbf{g}=(0,v_0),\ v_0\in H^{\frac{1}{2}}_{00}(\Sigma)\). Note that \(\mathbf{g}|\mathbf{n}=0\).
This problem has the following variational formulation: find \((\mathbf{u},p)\in H^1(\Omega)^2\times L^2_0(\Omega)\) such that for all \((\mathbf{v},p)\in H^1_0(\Omega)^2\times L^2_0(\Omega)\):
The following XLiFE++ implementation of this problem solves the 2D Stokes problem using different couples of approximation for the velocity \(v\) and the pressure \(p\) : (P2, P0), (P2, P1), (CR, P0); CR corresponds to a P1 Crouzeix-Raviart finite element approximation leading to a non-conforming approximation of \(H^1\). Note that the (P1, P0) approximation is not working because of dof locking.
#include "xlife++.h"
using namespace xlifepp;
using namespace std;
Vector<Real> g(const Point& p, Parameters& pa = defaultParameters)
{
Vector<Real> r(2,0.);
r(2)=1.;
return r;
}
int main(int argc, char** argv)
{
init(_lang=en); // mandatory initialization of xlifepp
verboseLevel(1);
//geometry data
Square sq(_origin=Point(0.,0.),_length=1., _nnodes=30, _domain_name="Omega",
_side_names=Strings("Gamma","Gamma", "Gamma", "Sigma"));
Mesh mesh(sq, _shape=triangle);
Domain Omega=mesh.domain("Omega");
Domain Sigma=mesh.domain("Sigma");
Domain Gamma=mesh.domain("Gamma");
// solve Stokes 2D for several approximations
list<pair<InterpolationType,InterpolationType>> pint={{P0,P2},{P1,P2},{P0,CR}};
for (auto ps:pint)
{
Space H1(_domain=Omega,_interpolation=ps.second,_name="H1");
Unknown u(H1,_name="u",_dim=2); TestFunction v(u,_name="v");
Space L2(_domain=Omega,_interpolation=ps.first,_name="L2");
Unknown p(L2,_name="p"); TestFunction q(p,_name="q");
BilinearForm a = intg(Omega,grad(u)%grad(v))-intg(Omega,p*div(v))-intg(Omega,div(u)*q);
EssentialConditions ecs = (u|Gamma = 0) & (u | Sigma = g) & (intg(Omega,p)=0);
TermMatrix A(a,ecs,_name="A");
TermVector b(u,Omega,0.,_name="b");
TermVector X=directSolve(A,b);
String filename=fileNameFromComponents("u", words("interpolation",ps.first)+"_"+words("interpolation",ps.second), "vtu");
saveToFile(filename, X(p));
if (ps.second==_CR)
{
Space V1(_domain=Omega,_interpolation=P1, _name="V1");
TermVector u1=projection(X(u),V1,2);
saveToFile(filename, u1, _data_name="u1");
}
else saveToFile(filename, X(u));
}
return 0;
}
Using Paraview with the Glyph filter that represents 2D vectors with arrows, we get the following pictures:
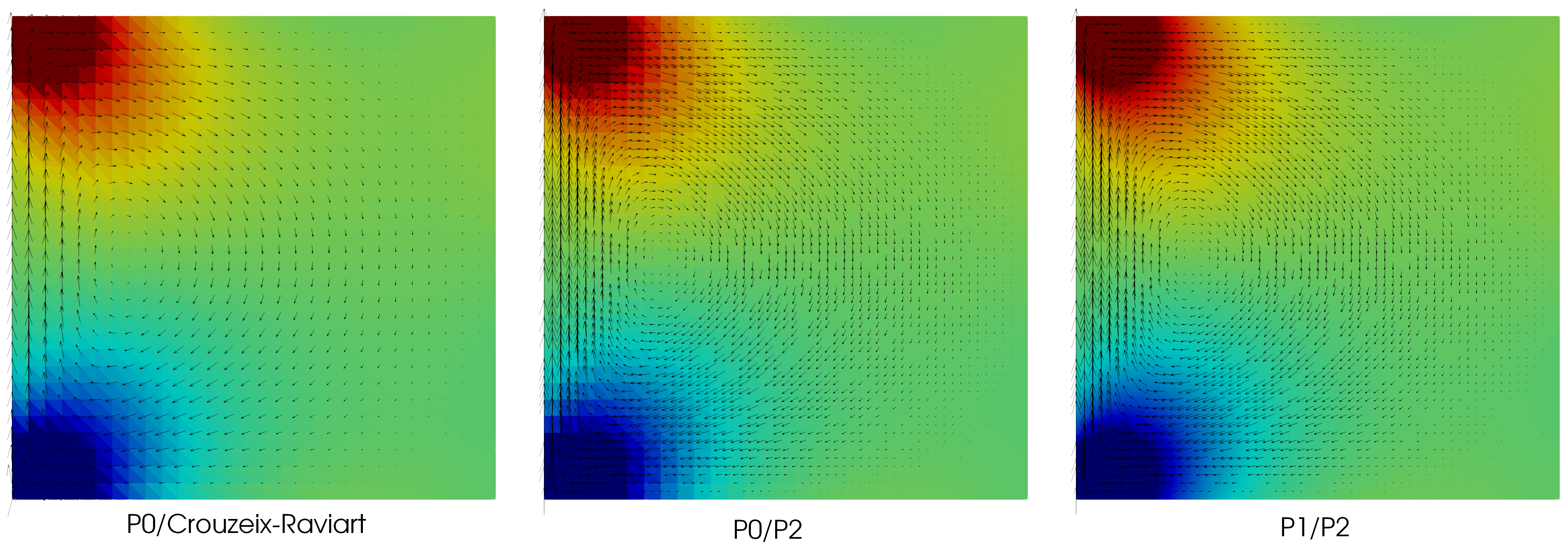
Fig. 11 Solution of the 2D Stokes problem using different approximations#
Note that to approximate the space \(L^2_0(\Omega)\), an essential condition of the zero mean type of pressure p has been used. Such a condition is quite costly because it interacts with all the pressure dofs. If we remove it, the matrix becomes singular (the pressure being defined to within a constant) and direct solvers fail. But iterative solvers do converge to the right velocity, and pressure to the right constant, determined by the initial guess of the iterative solver !
Note also that, when using Crouzeix-Raviart element, in order to visualize the velocity, it is required to project the CR solution in a standard Lagrange finite element space (here \(P_1\)).