
Fictitious domain method#
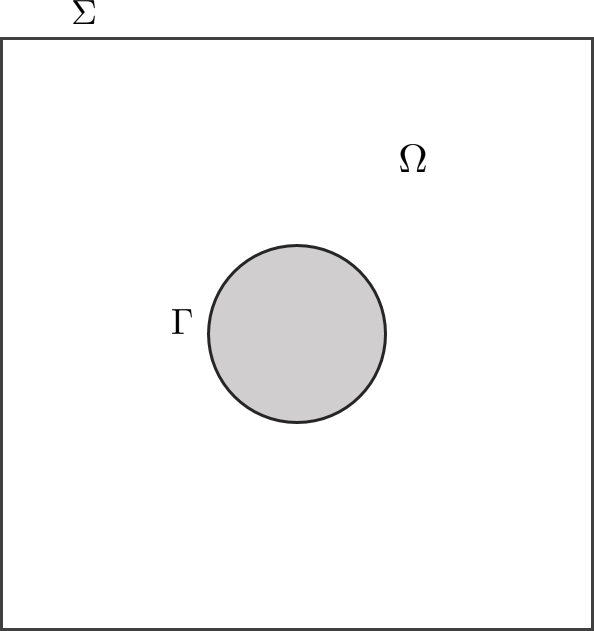
A well-known method to avoid some complex meshes consists in using the fictitious domain method where the boundary condition on an inside obstacle is taken into account by a Lagrange multiplier. To illustrate it, we consider the following 2D Laplace problem in the domain \(\Omega=C\backslash B(O,R)\) with \(C=]0,1[\times]0,1[\) the unit square, \(B(O,R)\) the ball with center \(C\) and radius \(R\) such that \(B\subset C\):
Let us introduce the minimization problem:
where
It has a unique solution \(\tilde{u}\in \tilde{V}(g)\) such that \(\tilde{u}=u\) on \(\Omega\) and there exists \(p\in H^{- \frac{1}{2}}(\Gamma)\) such that
where the integrals on \(\Gamma\) are to be understood as the duality product on \(H^{-\frac{1}{2}}(\Gamma)\times H^{\frac{1}{2}}(\Gamma)\).
The key idea of fictitious domain method is to use two different meshes for \(C\) and \(\Gamma\). As a consequence, the computation of integrals on \(\Gamma\) involves shape functions that lie on two different meshes, inducing interpolation operations from one mesh to the other one. XLiFE++ manages this interpolation operations in a hidden way for the user:
#include "xlife++.h"
using namespace xlifepp;
Real R;
Real f(const Point& P, Parameters& pa = defaultParameters)
{if(norm(P)<=R) return 0.;
return 2*pi_*pi_*sin(pi_*P(1))*sin(pi_*P(2));}
Real g(const Point& P, Parameters& pa = defaultParameters)
{return sin(pi_*P(1))*sin(pi_*P(2));}
int main(int argc, char** argv)
{
init(argc, argv, _lang=en); // mandatory initialization of xlifepp
// create meshes (rectangle and circle)
R=0.2;
SquareGeo sq(_xmin =0, _xmax = 1, _ymin = 0, _ymax = 1, _hsteps=0.05, _domain_name = "Omega", _side_names="Sigma");
Disk circle(_center=Point(0.5, 0.5), _radius =R, _hsteps=0.05, _domain_name = "Gamma");
Mesh meshS(sq, _shape=triangle);
Mesh meshG(circle, _shape=segment, _generator=gmsh);
Domain omega = meshS.domain("Omega"), sigmat = meshS.domain("Sigma"), gammat = meshG.domain("Gamma");
// create spaces and unknowns
Space Vt(_domain=omega, _interpolation=P1, _name="Vt");
Unknown ut(Vt, _name="ut"); TestFunction vt(ut, _name="vt");
Space W(_domain=gammat, _interpolation=P0, _name="W");
Unknown p(W, _name="p"); TestFunction q(p, _name="q");
// create bilinear forms and Terms
BilinearForm at = intg(omega, grad(ut)|grad(vt))-intg(gammat, p*vt) - intg(gammat, ut*q);
BoundaryConditions bcst = (ut|sigmat =0);
TermMatrix At(at, bcst, _name="At");
TermVector Ft(intg(omega, f*vt)-intg(gammat, g*q), _name="Ft");
// solve linear system and save the solution to a vtu file
TermVector Ut = directSolve(At, Ft);
saveToFile("Ut", Ut, _format=vtu);
return 0;
}
To extract the solution on the real domain \(\Omega\), a L2 projection is used:
// create a mesh for Omega
Disk disk(_center=Point(0.5,0.5),_radius =R, _hsteps=0.05, _domain_name = "Obstacle", _side_names="Gamma");
Mesh mesh(rectangle-disk);
Domain omega = mesh.domain("Omega");
Space V(omega,P1,"V"); Unknown u(V,"u"); TestFunction v(u,"v");
//compute L2 projection of ut on omega
TermMatrix M(intg(omega,u*v)), M2(intg(omega,ut*v));
TermVector PUt = directSolve(M,M2*Ut);
saveToFile("PUt",PUt,_vtu);
Note that the computation of the matrix M2 also requires a computation of an integral involving two meshes!
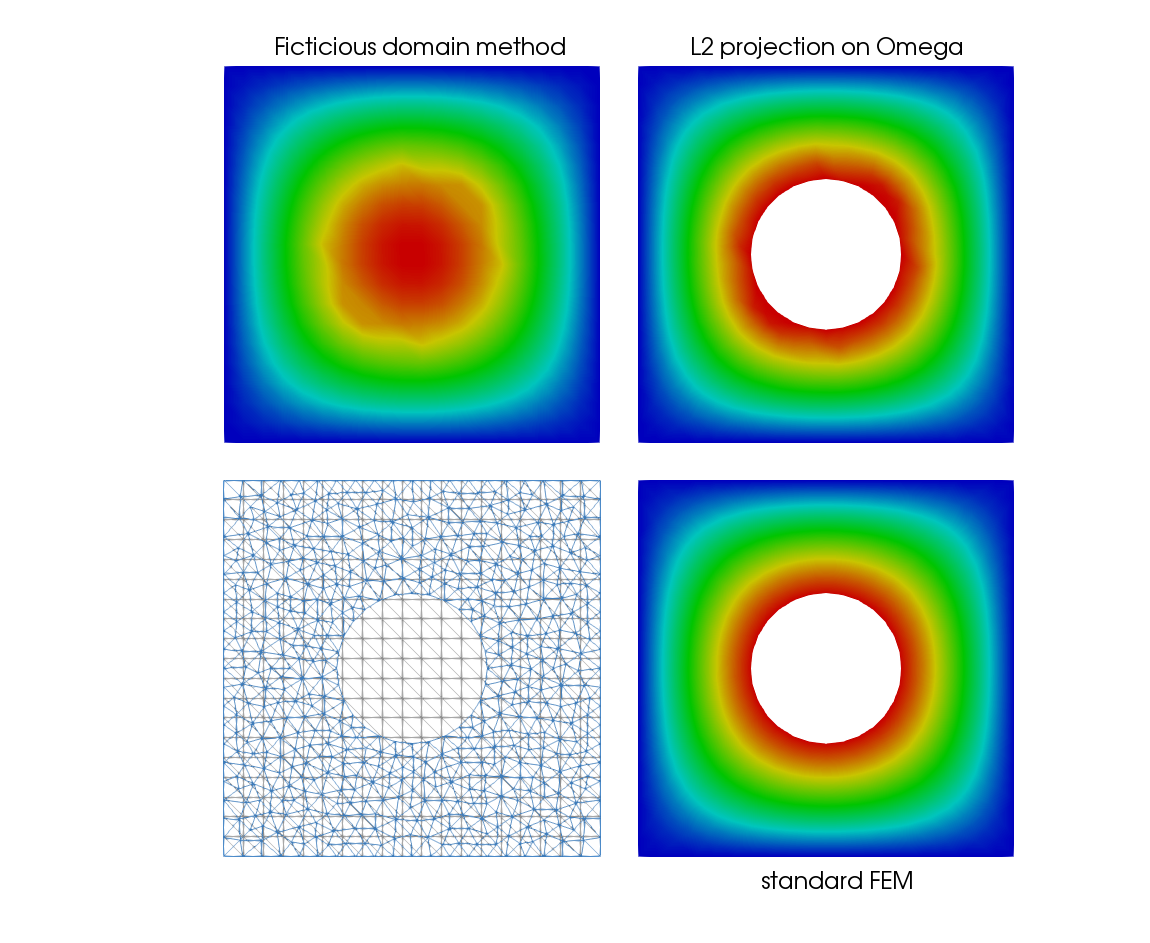
Fig. 28 Solution of the Laplace 2D problem with the fictitious domain method#